
- ALFI
- ARITMA-Info
- ARITMA-Leták
- DISCiPLE
- Minigraf 0507
- BT 100
- Didaktik 40
- Didaktik 80
- BDI
- BetaDisk
- DivIDE
- Interface M/P
- Nadstavba D80 pre divIDE
- Kempston IF E
- Kempston Mouse
- Keypad
- Melodik
- SD-(re)corder
- Melodik v2
- TZXduino
- UR-4
- UPI
- ZX Diskface Plus A
- ZX ExBoard 3
- ZX Diskface Quick
- ZX Printer
- ZX Diskface Gen2
- ZX Interface I
- ZX Microdrive
- ZX Interface II
- ZX-VGA-JOY
- SDI-1
- 80kB-Troller/Císař
- Amatérské Rádio o ZX
- Rutiny ROMD40/80
- MDOS-format
- BASIC a BETADISK
- TRDOS a strojový kód
- Format disket TRDOS
- Stavba Betadisku
- Stavebnice MiniGraf 0517
- Centronics a EPSON
- HPGL a ploter
- Centronics pro ZX [1]
- Aritma a PC
- Centronics pro ZX [2]
- Basic ZX Spectra
- ByteFEST 2016
- Klávesnice na ZX
- ByteFEST 2017
- Co v manuálu nenajdete
- ByteFEST 2018
- CP/M na ZX Spectrum
- ByteFEST 2019
- Kanály a Proudy
- Deprchator
- Jak se programovalo na ZX
- Klíčová slova Sinclair Basic
- Jak se rodil R-Type na ZX
- Kompatibilita Gamy a ZXS
- LEC ROM pro ZXS
- Mazání Eprom
- Disketové mechaniky
- Modulator VIDEO OUT
- Něco málo o Betadisku
- Obnova starých pásek
- Paměť CMOS k ZXS
- Paměť ZX Spectra
- Práce s magnerofonem
- Programovatelný ovladač
- Programové tipy
- RAM-DISK
- Jak kreknout ruské věci
- Systémové proměnné
- Mistrum
- ZX Spectrum a I/O
- Klub Uživatelů Betadisku
-
 Legendární ZX
Legendární ZX
-
Sparrow LITE
-
Úprava D40
-
Tools 128
-
ROM for Spectrum
-
+3e/+2e howto
-
2A,2B + D40/80
-
8bity.cz
-
Busy
-
Bytedelight
-
Cygnus
-
El Foro Del Spectrum
-
Emulators - Portables
-
ESXDOS
-
comp.sys.sinclair FAQ
-
nostalcomp-G540
-
Gerber Viewer
-
Gopher
-
Online Gerber Viewer
-
KiCAD-návod
-
Level ZX
-
MK14 v2.0
-
Level ZX2
-
Náhrady za ruské IO
-
OldGames-sk
-
Převod kazet do PC
-
Převod D40/D80 do PC/1
-
Emulování obrazů disket
-
Převod D40/D80 do PC/2
-
Znaková sada ZX
-
BASIC Programming
-
Repairing Spectrum
-
Služba GOPHER
-
Verze textového editoru D-Text
-
Výměna napěťového regulátoru
-
Rozšířená syntaxe BASICu
-
SellMyRetro
-
VeleSoft
-
Info o rozšíření paměti
-
Archív RZX videí
-
ProjectSPECCY
-
z00m
-
+3e, +3, +2A
-
Programujeme zvuky a hudbu na ZX Spectru
-
Zvuky a hudba na ZX Spectru: zvukové čipy řady AY-3-8910

|
Zimního času |

| IP adresa
18.119.161.216 |

9/88 
Předchozí část  zde
zde
Začneme od konce - část elektro
l když zapisovač ještě nemáme poskládaný a desku plošných spojů nemáme kam instalovat, začneme právě od ní, v dalších částech budeme se znalostmi o ní už počítat.
Pro pohyby papíru a pera jsou použity krokové motorky s typovým označením SMR 300-100 RI/24. Protože předpokladáme, že většina z vás dosud neměla příležitost se s nimi setkat, vysvětlíme si zvláštnosti tohoto typu motorků.
Krokový motor má tu výbornou vlastnost, že když z řídicího systému (počítače) vyšleme jeden impuls přes příslušné řídicí a přizpůsobovací obvody, hřídel krokového motoru se pootoči o přesný úhel, který je daný typem motoru a u některých druhů krokových motorů způsobem řízení. V našem konkrétním případě se hřídel motorku pootočí o 45° (popřípadě o 9°). Když jsme správně navrhli mechanickou část, máme jistotu, že po vyslání příslušného počtu impulsů se hřídel motorku pootočila o přesně definovaný úhel a výstupní mechanický člen, který na motor navazuje, vykonal přesně stanovenou dráhu. Proti jiným druhům pohonů je tu obrovská výhoda v tom, že (v jednoduchých případech) není zapotřebí zpětná vazba, čímž se zjednodušuje obvodové řešení a způsob řízení.
Princip činnosti krokového motoru spočívá v tom, že jeho rotor, který je vlastně magnetem s vystupujícími póly, se vždy snaží zaujmout takovou polohu v magnetickém poli, které vytvářejí cívky vinutí po obvodu rotoru, aby proti sobě byly orientovány nesouhlasné magnetícke póly. Zjednodušené schema je na obr 5.
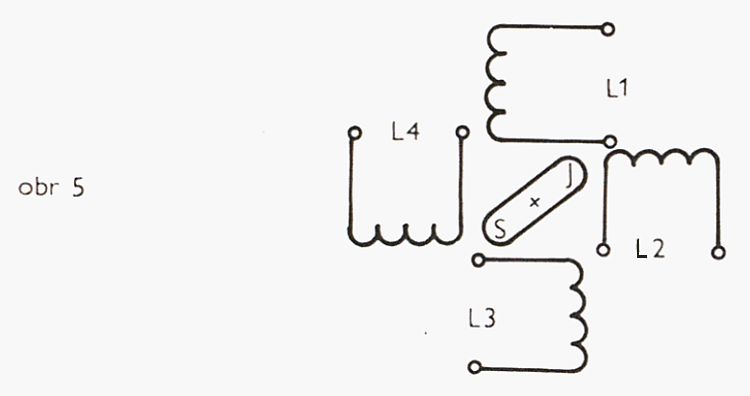
Na tomto schématu je naznačený dvoupólový (rotor má pouze dva poly) čtyřfázový (stator je složen ze čtyř samostatných vinutí) motor. V tomto případě existují dva ruzné způsoby řízení, z toho dva nesymetrickě a dva symetrické. Při symetrickém způsobu řízení můžeme současně spínat jen jedno vinutí, a to v pořadí: A, B, C, D,A...(nebo v pořadí opačném A, D, C, B, A... pro opačný smysl otáčení), nebo pro dvě vinuti - AB, BC, CD, DA, AB
V prvním i druhém případě se hřídel motoru otočí vždy po přepnutí o 90°, ale ty dva způsoby se liší výslednou orientací rotoru vůči statorovým vinutím a různou zatížitelností hřídele.
Nesymetrický způsob se tak nazývá proto, že se navzájem střídají jedno a dvě spínaná vinutí. Například jeden ze způsobů, který se používá nejčastěji, bude: A, AB, B, BC, C, CD, D, DA...
V tomto případě se bude hřídel motoru pootáčet o 45°, takže velikost kroku je proti předchozímu typu řízení 2 x menší.
Symetrické řízení v daném případě, protože se opakuje po vykonání čtyř cyklů, můžeme nazývat čtyřtaktním. Nesymetrické pak osmitaktním.
Přejděme od tohoto zjednodušeného modelu k našemu konkrétnímu motorku
SMR (obr. 6).
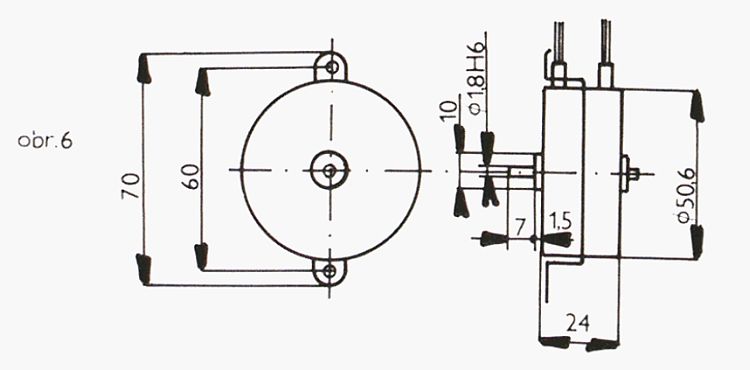
Několik základních údajů:
typ - čtyřfázový
počet kroků na otáčku - 40 (řízení čtyřtaktní); 80 (řízení osmitaktní)
maximalni rozběhová frekvence - 280 Hz (čtyřtaktní řízení); 560 Hz (osmitaktni řízení)
Na obr. 7 jsou uvedeny časové diagramy, které určují postupnost komutace jednotlivýçh vinutí motorku v jednotlivých fázích.
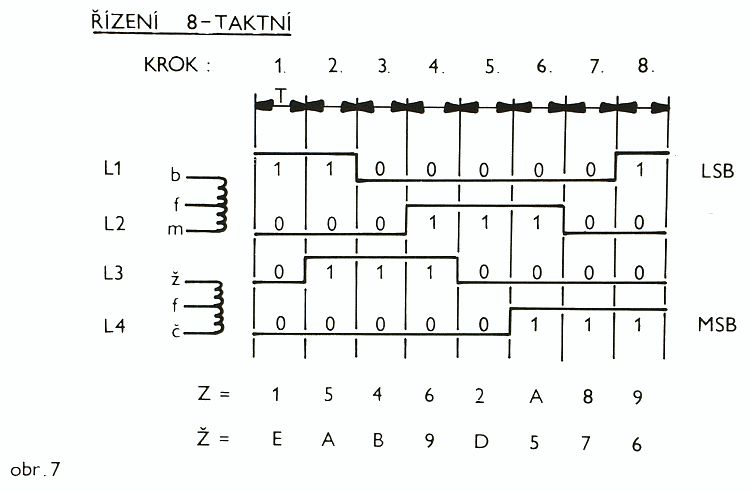
Časový diagram nám předepisuje postupnost, ve které budeme spínat jednotlivá vinutí. Podívejme se na obr. 7, na němž je časový diagram pro 8taktní řízení, které budeme u zapisovače využívat. V prvním kroku přívádíme napětí na A cívku (jeji vodič vedoucí z motorku má bílou barvu), ve druhem kroku na A a C vinutí (barva vodiče je žlutá), ve třetím kroku budeme budit opět jedno vinutí C atd. Z toho, co jsme řekli předtím, vidíme, že se jedná o nesymetrický způsob řízení (střídavě se přivádí napětí na jedno a na dvéě vinutí). Na časovém diagramu jsou také naznačeny cívky vinutí a je vidět, proč má motorek až 6 vodičů.
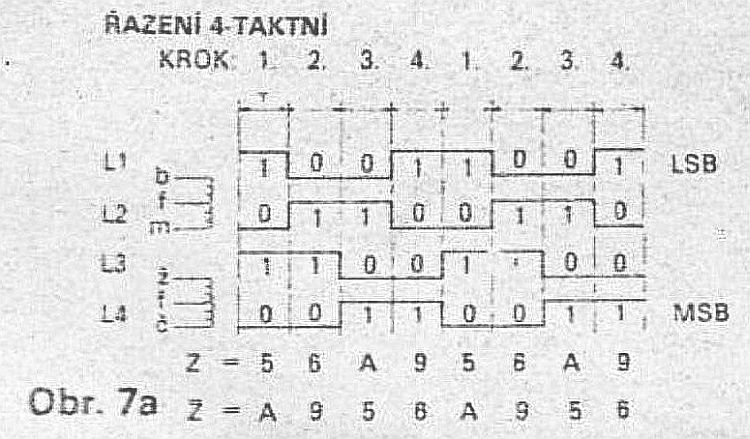
Ve spodní části obrázků 7a a 7 jsou vypsána hexadecimální čísla Z, která odpovídaji jednotlivým krokům motorku, když jednotlivé časové závislosti interpretujeme jako bity čtyřbitověho čísla. Přitom předpokládáme, že bit, který odpovídá časovému průběhu cívky L1, má nejnižší váhu, bit pro cívku L4 má nejvyšší váhu. Jsou zde také vypsány negovaně hodnoty čísel Z K čemu je to dobré, to se dozvíme až o něco později.
Postupnost spínání se v průmyslových aplikacích zabezpečuje tzv. rozdělovačem impulsů. Na jeho jeden vstup se přivádí informace o směru chodu a příchod impulsu na jeho druhý vstup způsobí přechod výstupů daného kroku na další. Rozdělovač impulsů obsahuje logickou část, na kterou navazují tranzistory schopné spínat nevelké proudy. Pokud se používají výkonné krokové motorky, připojuji se k desce rozdělovače přes desku výkonových výstupů. Málo výkonné motorky (jako v našem případě) je možné připojit přímo k desce rozdělovače.
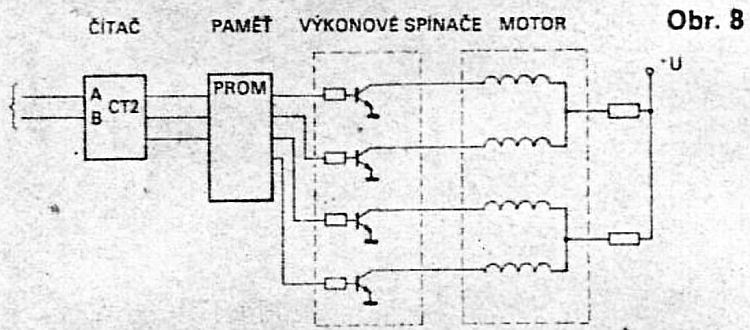
Na obr. 8 je naznačen princip rozdělovače impulsů. Čítač vždy po příchodu impulsů na vstup A zvýší (anebo sníží, v závislosti na hodnotě vstupu B) svůj obsah o l. Jeho výstup může nabýt hodnoty v rozmezí od 0 do 7, tedy 8 různých stavů. Výstupy čítače jsou připojeny na adresovací vstupy pamětí, která je odpovídajícím způsobem programovaná. Osm různých slov paměti odpovídá osmi různým krokům a jeji čtyři výstupy odpovídají čtyřem vinutím motoru. Výstupy paměti jsou připojeny na báze tranzistorů, v jejichž kolektorech jsou zapojena jednotlivá vinutí motoru.
Kdybychom chtěli změnit způsob řízení (např. na čtyřtaktní), bylo by zapotřebí patřičnym způsobem programovat pamět anebo mit vydělený další adresovací vstup, jehož pomocí bychom "listovali" v jiné oblasti paměti, v níž by byly uloženy údaje pro tento typ řízení.
Pokusme se však dané schéma o néco zjednodušit. Protože se na rozdělovač impulsů přípojujeme počítačem, nahraďme čítač inteligencí počítače. V tomto případě tedy nebudeme motor ovládat dvěma signály, ale třemi, budeme tudíž vstupovat od počítače přímo na vstupy pamětí ROM (obr. 9).
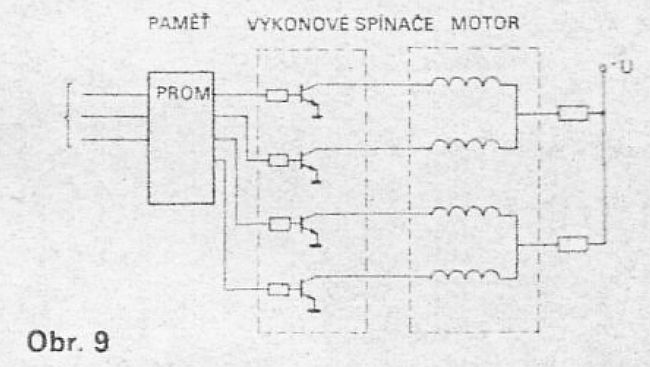
Od počítače budeme generovat 3bitová binární čísla. Jestli je daný stav vstupů pamětí např. 5 a chceme rotor motoru pootočit směrem vpřed (vzad), vyšleme hodnotu 5 (4). Takové obvodové řešení elektroniky řídících obvodů se užívá například u zapisovačů čs. výroby DIDAKTIK M a MINIGRAF. Ale co takhle situaci obvodově ještě víc zjednodušit (pro počítač však zkomplikovat) tím, že vynecháme rovněž paměť (obr. 10)?
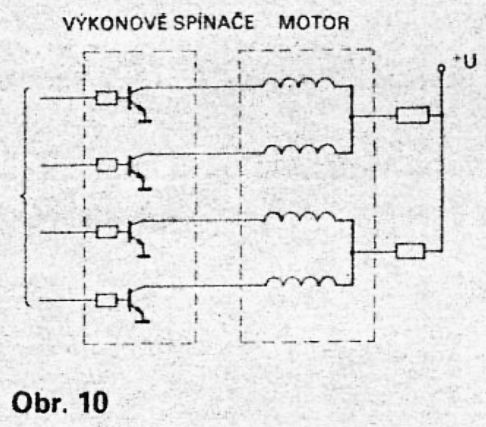
Pro počítač nebude problém přivádět na báze tranzistorü logické hodnoty, které v tomto případě budou opsané přímo z časového diagramu. Bude si je vyhledávat v tabulce uložené v paměti.
Situace se natolik zjednodušila, že z původní desky rozdélovače impulsů nám zůstaly pouze výkonové spínače. Z logických obvodů nezůstalo nic. To má velký vyznam v tom, že je možné zjednodušit napájecí zdroj, protože nyní vystačíme s jedním napájením. Není zanedbatelné ani to, že se zjednoduší deska plošných spojů a samozřejmě ani to, že toto řešení má výhodu i v ceně. Nevýhoda zvýšeného počtu vodičů je vzhledem k získaným přednostem naopak zanedbatelná.
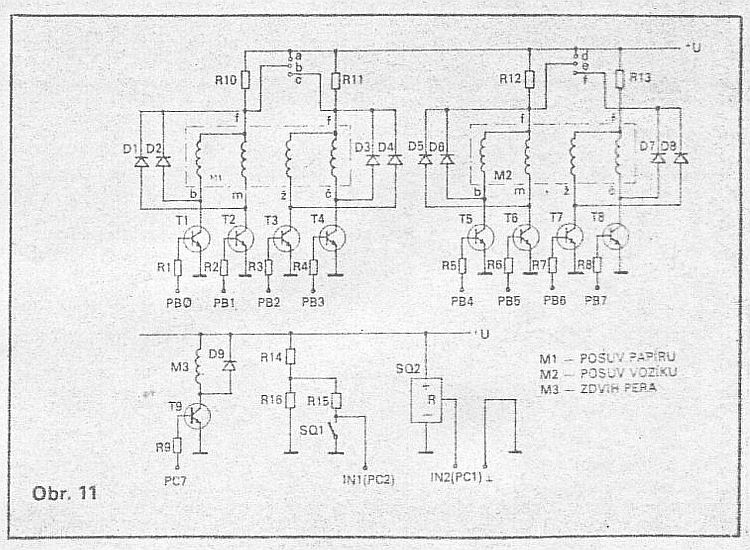
Na obr. 11 je úplne schéma souřadnicového zapisovače. Schéma kromě motorku
a jejich řídicích obvodů obsahuje elektromagnet M3 (cívka-relé), který bude sloužit pro zdvih (cívka neaktivovaná) a pro spouštém pera (cívka pod napětím). Diody Dl~D9 slouží pro potlačení indukovaného proudu, ktery vzniká při rozpínání indukční zátěže a mohl by zničit tranzistory.
Další části schématu nejsou nevyhnutelné pro chod zapisovače, ale v případě potřeby mohou být na desce plošných spojů osazené. Odpory RM-Rl0 spolu s mikrospínačem SQ1 slouží k přivádéni logické úrovně v případě, že se vozík zapisovače nachází v levé krajní poloze. Jejich hodnota závisí na velikosti napájecího napětí. Snímač SQ2 není součásti desky plošných spojů, připojuje se k ní pomocí tří vodičů a může sloužit jako optický snímač pro dígitalizaci obrazové předlohy, případně pro snímání konce papíru apod.
Napájení motorů: Výrobce sice doporučuje napájecí napětí pro motory 24V a předřadné odpory R10-R13 62 ohm/G W, ale v tomto případě se 2/3 energie mění na teplo na odporech. Odpory se mohou zahřát na nepřípustnou teplotu, a protože předpokládáme, že ALFI budou používat i děti, odpory jsem jednoduše vynechal s tím, že napájecí napětí bylo sníženo na 8V. Nepoužíti odporů nepříliš zhorší momentově frekvenční charakteristiku motoru omezení jeho maximální rychlosti, ale zato oproti původnímu řešení spotřebuje 3× méně výkonný tranzístor.
Na desce plošných spojů je však ponechané místo pro odpory a v případě potřeby je možné osadit je. V tom případě je ale nutné použít relé na napětí 24 V, protože větev + U je společná pro motory i pro relé. Pokud odpory vynecháme body a-b; c. d-e-f (stejně jsou označeny i na plošném spoji) se navzájem propojí.
Oživení desky spočívá v prověření spínací funkce všech tranzistorů. Můžeme začít od tranzistoru T9 tak, že na odpovídající výstupy desky připojíme relé a na vstupní konektor (označení PC7) přivedeme střídavě úroveň log. 1 a log. 0. Relé musí přitom spolehlivě spínat. Ostatní tranzistory můžeme prověřit shodně tak, že místo jednotlivých vinutí motorů budeme postupně připojovat cívku relé. Pokud se stavbou začneme až po přečtení celého návodu, nejspolehlivějším odzkoušením obvodů motorů bude napojení desky na počítač a odzkoušení motorů pomocí programu. Avšak i v tomto případě je nutné před připojením k počítači zkontrolovat spínací funkce jednotlivých tranzístorů.
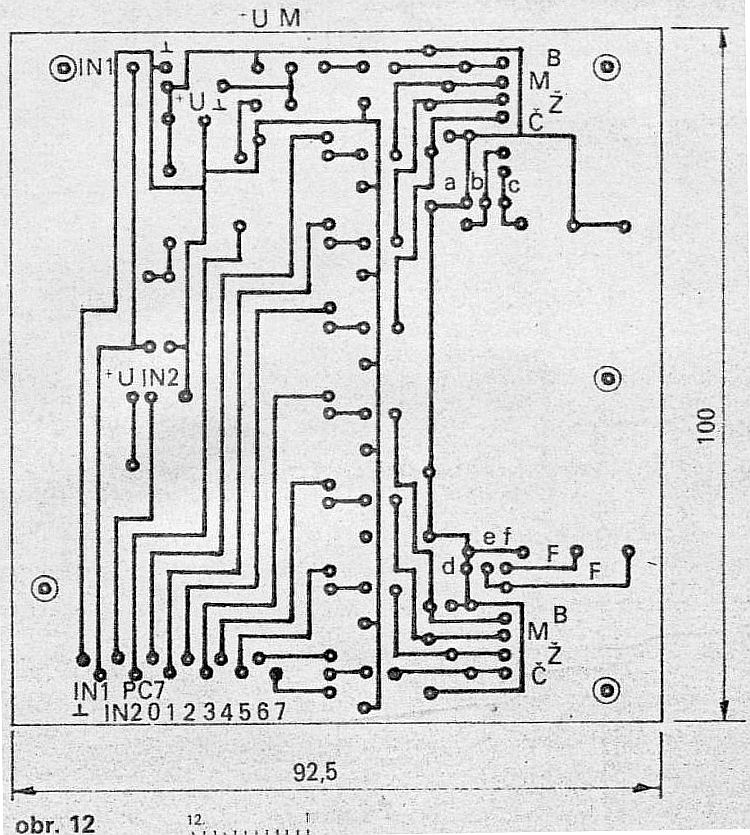
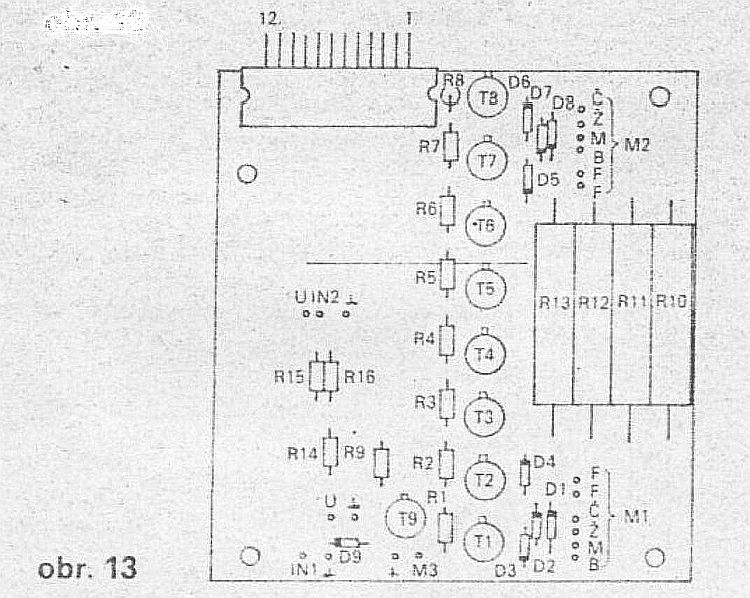
Na obr. 12 je motiv plošných spojů pro elektroniku zapisovače. Na obr. 13 je pohled na osazenou desku.
Seznam prvků desky:
1ks...Cuprexit 100×95
9ks...Tranzistor KF508 A (509)
9ks...Dioda KA222(KY130/100)
9ks...Odpor 1K
1ks...Konektor WK46206
4ks...Šroub M3,5×10
4ks...Matice M3.5
1ks...Šroub M3x6
1ks...Matice M3
4ks...Gumová podložka č.95c
1ks...Lanko 60cm
1ks...Reproduktorová zásuvka
(používá se jako napájecí konektor a osazuje se na zadní část nosníků 1 a 2).

Pokračování  zde
zde
Stránka byla už zobrazena: 360 ×
Aktualizováno: 29. 3. 2018, 17:39
|
|







|


|

|

|



|


|

|
Stránka načtena za 0.00175 sekund.